|
|
|
|




Next: 4.4 MITgcm execution under
Up: 4.3 Using the WRAPPER
Previous: 4.3.2 Starting the code
Contents
Subsections
4.3.3 Controlling communication
The WRAPPER maintains internal information that is used for communication
operations and that can be customized for different platforms. This section
describes the information that is held and used.
- Tile-tile connectivity information
For each tile the WRAPPER sets a flag that sets the tile number to
the north, south, east and west of that tile. This number is unique
over all tiles in a configuration. Except when using the cubed
sphere and the exch2 package, the number is held in the variables
tileNo ( this holds the tiles own number), tileNoN, tileNoS, tileNoE and tileNoW. A parameter is also
stored with each tile that specifies the type of communication that
is used between tiles. This information is held in the variables
tileCommModeN, tileCommModeS, tileCommModeE and
tileCommModeW. This latter set of variables can take one of
the following values COMM_NONE, COMM_MSG, COMM_PUT and COMM_GET. A value of COMM_NONE is
used to indicate that a tile has no neighbor to communicate with on
a particular face. A value of COMM_MSG is used to indicate
that some form of distributed memory communication is required to
communicate between these tile faces (see section
4.2.7). A value of COMM_PUT or COMM_GET is used to indicate forms of shared
memory communication (see section
4.2.6). The COMM_PUT value
indicates that a CPU should communicate by writing to data
structures owned by another CPU. A COMM_GET value indicates
that a CPU should communicate by reading from data structures owned
by another CPU. These flags affect the behavior of the WRAPPER
exchange primitive (see figure 4.7).
The routine ini_communication_patterns() is responsible for
setting the communication mode values for each tile.
When using the cubed sphere configuration with the exch2 package,
the relationships between tiles and their communication methods are
set by the exch2 package and stored in different variables. See the
exch2 package documentation (6.2.4 for details.
- MP directives
The WRAPPER transfers control to numerical application code through
the routine THE_MODEL_MAIN. This routine is called in a way
that allows for it to be invoked by several threads. Support for
this is based on either multi-processing (MP) compiler directives or
specific calls to multi-threading libraries (eg. POSIX
threads). Most commercially available Fortran compilers support the
generation of code to spawn multiple threads through some form of
compiler directives. Compiler directives are generally more
convenient than writing code to explicitly spawning threads. And,
on some systems, compiler directives may be the only method
available. The WRAPPER is distributed with template MP directives
for a number of systems.
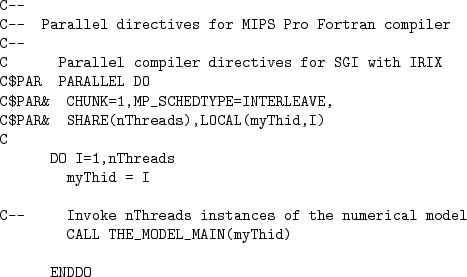
These directives are inserted into the code just before and after
the transfer of control to numerical algorithm code through the
routine THE_MODEL_MAIN. Figure 4.12 shows
an example of the code that performs this process for a Silicon
Graphics system. This code is extracted from the files main.F
and MAIN_PDIRECTIVES1.h. The variable nThreads
specifies how many instances of the routine THE_MODEL_MAIN
will be created. The value of nThreads is set in the routine
INI_THREADING_ENVIRONMENT. The value is set equal to the the
product of the parameters nTx and nTy that are read from
the file eedata. If the value of nThreads is
inconsistent with the number of threads requested from the operating
system (for example by using an environment variable as described in
section 4.3.2.1) then usually an error
will be reported by the routine CHECK_THREADS.
- memsync flags
As discussed in section 4.2.6.1, a low-level
system function may be need to force memory consistency on some
shared memory systems. The routine MEMSYNC() is used for this
purpose. This routine should not need modifying and the information
below is only provided for completeness. A logical parameter exchNeedsMemSync set in the routine INI_COMMUNICATION_PATTERNS() controls whether the MEMSYNC() primitive is called. In general this routine is only
used for multi-threaded execution. The code that goes into the MEMSYNC() routine is specific to the compiler and processor used.
In some cases, it must be written using a short code snippet of
assembly language. For an Ultra Sparc system the following code
snippet is used
asm("membar #LoadStore|#StoreStore");
for an Alpha based system the equivalent code reads
asm("mb");
while on an x86 system the following code is required
asm("lock; addl $0,0(%%esp)": : :"memory")
- Cache line size
As discussed in section 4.2.6.2,
milti-threaded codes explicitly avoid penalties associated with
excessive coherence traffic on an SMP system. To do this the shared
memory data structures used by the GLOBAL_SUM, GLOBAL_MAX and BARRIER routines are padded. The variables
that control the padding are set in the header file EEPARAMS.h. These variables are called cacheLineSize, lShare1, lShare4 and lShare8. The default values
should not normally need changing.
- _BARRIER
This is a CPP macro that is expanded to a call to a routine which
synchronizes all the logical processors running under the WRAPPER.
Using a macro here preserves flexibility to insert a specialized
call in-line into application code. By default this resolves to
calling the procedure BARRIER(). The default setting for the
_BARRIER macro is given in the file CPP_EEMACROS.h.
- _GSUM
This is a CPP macro that is expanded to a call to a routine which
sums up a floating point number over all the logical processors
running under the WRAPPER. Using a macro here provides extra
flexibility to insert a specialized call in-line into application
code. By default this resolves to calling the procedure GLOBAL_SUM_R8() ( for 64-bit floating point operands) or GLOBAL_SUM_R4() (for 32-bit floating point operands). The
default setting for the _GSUM macro is given in the file CPP_EEMACROS.h. The _GSUM macro is a performance critical
operation, especially for large processor count, small tile size
configurations. The custom communication example discussed in
section 4.3.3.2 shows how the macro is used to invoke
a custom global sum routine for a specific set of hardware.
- _EXCH
The _EXCH CPP macro is used to update tile overlap regions. It is
qualified by a suffix indicating whether overlap updates are for
two-dimensional ( _EXCH_XY ) or three dimensional ( _EXCH_XYZ )
physical fields and whether fields are 32-bit floating point (
_EXCH_XY_R4, _EXCH_XYZ_R4 ) or 64-bit floating point (
_EXCH_XY_R8, _EXCH_XYZ_R8 ). The macro mappings are defined in
the header file CPP_EEMACROS.h. As with _GSUM, the _EXCH
operation plays a crucial role in scaling to small tile, large
logical and physical processor count configurations. The example in
section 4.3.3.2 discusses defining an optimized and
specialized form on the _EXCH operation.
The _EXCH operation is also central to supporting grids such as the
cube-sphere grid. In this class of grid a rotation may be required
between tiles. Aligning the coordinate requiring rotation with the
tile decomposition, allows the coordinate transformation to be
embedded within a custom form of the _EXCH primitive. In these
cases _EXCH is mapped to exch2 routines, as detailed in the exch2
package documentation 6.2.4.
- Reverse Mode
The communication primitives _EXCH and _GSUM both employ
hand-written adjoint forms (or reverse mode) forms. These reverse
mode forms can be found in the source code directory pkg/autodiff. For the global sum primitive the reverse mode form
calls are to GLOBAL_ADSUM_R4 and GLOBAL_ADSUM_R8.
The reverse mode form of the exchange primitives are found in
routines prefixed ADEXCH. The exchange routines make calls to
the same low-level communication primitives as the forward mode
operations. However, the routine argument simulationMode is
set to the value REVERSE_SIMULATION. This signifies to the
low-level routines that the adjoint forms of the appropriate
communication operation should be performed.
- MAX_NO_THREADS
The variable MAX_NO_THREADS is used to indicate the maximum
number of OS threads that a code will use. This value defaults to
thirty-two and is set in the file EEPARAMS.h. For single
threaded execution it can be reduced to one if required. The value
is largely private to the WRAPPER and application code will not
normally reference the value, except in the following scenario.
For certain physical parametrization schemes it is necessary to have
a substantial number of work arrays. Where these arrays are
allocated in heap storage (for example COMMON blocks) multi-threaded
execution will require multiple instances of the COMMON block data.
This can be achieved using a Fortran 90 module construct. However,
if this mechanism is unavailable then the work arrays can be extended
with dimensions using the tile dimensioning scheme of nSx and
nSy (as described in section
4.3.1). However, if the
configuration being specified involves many more tiles than OS
threads then it can save memory resources to reduce the variable
MAX_NO_THREADS to be equal to the actual number of threads
that will be used and to declare the physical parameterization work
arrays with a single MAX_NO_THREADS extra dimension. An
example of this is given in the verification experiment aim.5l_cs. Here the default setting of MAX_NO_THREADS is
altered to
INTEGER MAX_NO_THREADS
PARAMETER ( MAX_NO_THREADS = 6 )
and several work arrays for storing intermediate calculations are
created with declarations of the form.
common /FORCIN/ sst1(ngp,MAX_NO_THREADS)
This declaration scheme is not used widely, because most global data
is used for permanent not temporary storage of state information.
In the case of permanent state information this approach cannot be
used because there has to be enough storage allocated for all tiles.
However, the technique can sometimes be a useful scheme for reducing
memory requirements in complex physical parameterizations.
Figure 4.12:
Prior to transferring control to the procedure THE_MODEL_MAIN() the WRAPPER may use MP directives to spawn
multiple threads.
 |
The isolation of performance critical communication primitives and the
sub-division of the simulation domain into tiles is a powerful tool.
Here we show how it can be used to improve application performance and
how it can be used to adapt to new griding approaches.
4.3.3.2 JAM example
On some platforms a big performance boost can be obtained by binding
the communication routines _EXCH and _GSUM to
specialized native libraries (for example, the shmem library on CRAY
T3E systems). The LETS_MAKE_JAM CPP flag is used as an
illustration of a specialized communication configuration that
substitutes for standard, portable forms of _EXCH and _GSUM. It affects three source files eeboot.F, CPP_EEMACROS.h and cg2d.F. When the flag is defined is has
the following effects.
- An extra phase is included at boot time to initialize the custom
communications library ( see ini_jam.F).
- The _GSUM and _EXCH macro definitions are replaced
with calls to custom routines (see gsum_jam.F and exch_jam.F)
- a highly specialized form of the exchange operator (optimized
for overlap regions of width one) is substituted into the elliptic
solver routine cg2d.F.
Developing specialized code for other libraries follows a similar
pattern.
4.3.3.3 Cube sphere communication
Actual _EXCH routine code is generated automatically from a
series of template files, for example exch_rx.template. This
is done to allow a large number of variations on the exchange process
to be maintained. One set of variations supports the cube sphere grid.
Support for a cube sphere grid in MITgcm is based on having each face
of the cube as a separate tile or tiles. The exchange routines are
then able to absorb much of the detailed rotation and reorientation
required when moving around the cube grid. The set of _EXCH
routines that contain the word cube in their name perform these
transformations. They are invoked when the run-time logical parameter
useCubedSphereExchange is set true. To facilitate the
transformations on a staggered C-grid, exchange operations are defined
separately for both vector and scalar quantities and for grid-centered
and for grid-face and grid-corner quantities. Three sets of exchange
routines are defined. Routines with names of the form exch_rx
are used to exchange cell centered scalar quantities. Routines with
names of the form exch_uv_rx are used to exchange vector
quantities located at the C-grid velocity points. The vector
quantities exchanged by the exch_uv_rx routines can either be
signed (for example velocity components) or un-signed (for example
grid-cell separations). Routines with names of the form exch_z_rx are used to exchange quantities at the C-grid vorticity
point locations.
Next: 4.4 MITgcm execution under
Up: 4.3 Using the WRAPPER
Previous: 4.3.2 Starting the code
Contents
mitgcm-support@mitgcm.org
| Copyright © 2006
Massachusetts Institute of Technology |
Last update 2018-01-23 |
 |
|











