 |
 |
|||||||||||
 |
|
|||||||||||
 |
 |
|||||||||||



|
Next: 6.6.3 SHELFICE Package Up: 6.6 Sea Ice Packages Previous: 6.6.1 THSICE: The Thermodynamic Contents Subsections
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Name | Default value | Description | Reference |
|---|---|---|---|
| SEAICEwriteState | T | write sea ice state to file | |
| SEAICEuseDYNAMICS | T | use dynamics | |
| SEAICEuseTEM | F | use truncated ellipse method | |
| SEAICEuseMetricTerms | T | use metric terms in dynamics | |
| SEAICEuseEVPpickup | T | use EVP pickups | |
| SEAICEuseFluxForm | F | use flux form for 2nd central difference advection scheme | |
| SEAICErestoreUnderIce | F | enable restoring to climatology under ice | |
| useHB87stressCoupling | F | turn on ice-ocean stress coupling following Hibler and Bryan [1987] | |
| usePW79thermodynamics | T | flag to turn off zero-layer-thermodynamics for testing | |
| SEAICEadvHeff/Area/Snow/Salt/Age | T | flag to turn off advection of scalar state variables | |
| SEAICEuseFlooding | T | use flood-freeze algorithm | |
| SEAICE_no_slip | F | switch between free-slip and no-slip boundary conditions | |
| LAD | 2 | time stepping scheme | |
| IMAX_TICE | 10 | iterations for ice heat budget | |
| SEAICE_deltaTtherm | dTracerLev(1) | thermodynamic timestep | |
| SEAICE_deltaTdyn | dTracerLev(1) | dynamic timestep | |
| SEAICE_dumpFreq | dumpFreq | dump frequency | |
| SEAICE_taveFreq | taveFreq | time-averaging frequency | |
| SEAICE_dump_mdsio | T | write snap-shot using MDSIO | |
| SEAICE_tave_mdsio | T | write TimeAverage using MDSIO | |
| SEAICE_dump_mnc | F | write snap-shot using MNC | |
| SEAICE_tave_mnc | F | write TimeAverage using MNC | |
| SEAICE_initialHEFF | 0.00000E+00 | initial sea-ice thickness | |
| SEAICE_drag | 2.00000E-03 | air-ice drag coefficient | |
| OCEAN_drag | 1.00000E-03 | air-ocean drag coefficient | |
| SEAICE_waterDrag | 5.50000E+00 | water-ice drag | |
| SEAICE_dryIceAlb | 7.50000E-01 | winter albedo | |
| SEAICE_wetIceAlb | 6.60000E-01 | summer albedo | |
| SEAICE_drySnowAlb | 8.40000E-01 | dry snow albedo | |
| SEAICE_wetSnowAlb | 7.00000E-01 | wet snow albedo | |
| SEAICE_waterAlbedo | 1.00000E-01 | water albedo | |
| SEAICE_strength | 2.75000E+04 | sea-ice strength Pstar | |
| SEAICE_sensHeat | 2.28400E+00 | sensible heat transfer (1.75E-03 * 1004 * 1.3) | |
| SEAICE_latentWater | 5.68750E+03 | latent heat transfer for water (1.75E-03 * 2.5E+06 * 1.3) | |
| SEAICE_latentIce | 6.44740E+03 | latent heat transfer for ice (1.75E-03 * 2.834E+06 * 1.3) | |
| SEAICE_iceConduct | 2.16560E+00 | sea-ice conductivity | |
| SEAICE_snowConduct | 3.10000E-01 | snow conductivity | |
| SEAICE_emissivity | 5.50000E-08 | Stefan-Boltzman | |
| SEAICE_snowThick | 1.50000E-01 | cutoff snow thickness | |
| SEAICE_shortwave | 3.00000E-01 | penetration shortwave radiation | |
| SEAICE_freeze | -1.96000E+00 | freezing temp. of sea water | |
| SEAICE_salinity | 0.0 | salinity of ice | |
| SEAICE_gamma_t | UNSET | restoring time scale for basal freezing and melting | |
| SEAICE_gamma_t_frz | UNSET | restoring time scale for basal freezing | |
| SEAICEstressFactor | 1.00000E+00 | scaling factor for ice-ocean stress | |
| Heff/Area/Hsnow/Hsalt/IceAgeFile | UNSET | initial fields for variables HEFF/AREA/HSNOW/HSALT/ICEAGE | |
| LSR_ERROR | 1.00000E-04 | sets accuracy of LSR solver | |
| DIFF1 | 4.00000E-03 | parameter used in advect.F | |
| A22 | 1.50000E-01 | parameter used in growth.F | |
| HO | 5.00000E-01 | demarcation ice thickness | |
| MAX_HEFF | 1.00000E+01 | maximum ice thickness | |
| MIN_ATEMP | -5.00000E+01 | minimum air temperature | |
| MIN_LWDOWN | 6.00000E+01 | minimum downward longwave | |
| MAX_TICE | 3.00000E+01 | maximum ice temperature | |
| MIN_TICE | -5.00000E+01 | minimum ice temperature | |
| SEAICE_EPS | 1.00000E-10 | reduce derivative singularities |
6.6.2.3.3 Input fields and units
- HeffFile:
- Initial sea ice thickness averaged over grid cell in meters; initializes variable HEFF;
- AreaFile:
- Initial fractional sea ice cover, range
![$ [0,1]$](img2634.png) ;
initializes variable AREA;
;
initializes variable AREA;
- HsnowFile:
- Initial snow thickness on sea ice averaged over grid cell in meters; initializes variable HSNOW;
- HsaltFile:
- Initial salinity of sea ice averaged over grid
cell in g/m
 ; initializes variable HSALT;
; initializes variable HSALT;
- IceAgeFile:
- Initial ice age of sea ice averaged over grid cell in seconds; initializes variable ICEAGE;
6.6.2.4 Description
[TO BE CONTINUED/MODIFIED]
The MITgcm sea ice model (MITgcm/sim) is based on a variant of the viscous-plastic (VP) dynamic-thermodynamic sea ice model [Zhang and Hibler, 1997] first introduced by Hibler [1980,1979]. In order to adapt this model to the requirements of coupled ice-ocean state estimation, many important aspects of the original code have been modified and improved:
- the code has been rewritten for an Arakawa C-grid, both B- and C-grid variants are available; the C-grid code allows for no-slip and free-slip lateral boundary conditions;
- two different solution methods for solving the nonlinear momentum equations have been adopted: LSOR [Zhang and Hibler, 1997], and EVP [Hunke and Dukowicz, 1997];
- ice-ocean stress can be formulated as in Hibler and Bryan [1987] or as in Campin et al. [2008];
- ice variables are advected by sophisticated, conservative advection schemes with flux limiting;
- growth and melt parameterizations have been refined and extended in order to allow for more stable automatic differentiation of the code.
The ice dynamics models that are most widely used for large-scale climate studies are the viscous-plastic (VP) model [Hibler, 1979], the cavitating fluid (CF) model [Flato and Hibler, 1992], and the elastic-viscous-plastic (EVP) model [Hunke and Dukowicz, 1997]. Compared to the VP model, the CF model does not allow ice shear in calculating ice motion, stress, and deformation. EVP models approximate VP by adding an elastic term to the equations for easier adaptation to parallel computers. Because of its higher accuracy in plastic solution and relatively simpler formulation, compared to the EVP model, we decided to use the VP model as the default dynamic component of our ice model. To do this we extended the line successive over relaxation (LSOR) method of Zhang and Hibler [1997] for use in a parallel configuration.
Note, that by default the seaice-package includes the orginial so-called zero-layer thermodynamics following Hibler [1980] with a snow cover as in Zhang et al. [1998]. The zero-layer thermodynamic model assumes that ice does not store heat and, therefore, tends to exaggerate the seasonal variability in ice thickness. This exaggeration can be significantly reduced by using Semtner's [1976] three-layer thermodynamic model that permits heat storage in ice. Recently, the three-layer thermodynamic model has been reformulated by Winton [2000]. The reformulation improves model physics by representing the brine content of the upper ice with a variable heat capacity. It also improves model numerics and consumes less computer time and memory. The Winton sea-ice thermodynamics have been ported to the MIT GCM; they currently reside under pkg/thsice. The package pkg/thsice is fully compatible with pkg/seaice and with pkg/exf. When turned on together with pkg/seaice, the zero-layer thermodynamics are replaced by the Winton thermodynamics.
The sea ice model requires the following input fields: 10-m winds, 2-m air temperature and specific humidity, downward longwave and shortwave radiations, precipitation, evaporation, and river and glacier runoff. The sea ice model also requires surface temperature from the ocean model and the top level horizontal velocity. Output fields are surface wind stress, evaporation minus precipitation minus runoff, net surface heat flux, and net shortwave flux. The sea-ice model is global: in ice-free regions bulk formulae are used to estimate oceanic forcing from the atmospheric fields.
6.6.2.4.1 Dynamics
The momentum equation of the sea-ice model is
where
where
For an isotropic system the stress tensor
![]() (
(![]() ) can
be related to the ice strain rate and strength by a nonlinear
viscous-plastic (VP) constitutive law [Hibler, 1979; Zhang and Hibler, 1997]:
) can
be related to the ice strain rate and strength by a nonlinear
viscous-plastic (VP) constitutive law [Hibler, 1979; Zhang and Hibler, 1997]:
The ice strain rate is given by
The maximum ice pressure
with the constants
|
with the abbreviation
| ||
The bulk viscosities are bounded above by imposing both a minimum
In the so-called truncated ellipse method the shear viscosity ![]() is capped to suppress any tensile stress [Geiger et al., 1998; Hibler and Schulson, 1997]:
is capped to suppress any tensile stress [Geiger et al., 1998; Hibler and Schulson, 1997]:

To enable this method, set #define SEAICE_ALLOW_TEM in SEAICE_OPTIONS.h and turn it on with SEAICEuseTEM=.TRUE. in data.seaice.
In the current implementation, the VP-model is integrated with the semi-implicit line successive over relaxation (LSOR)-solver of Zhang and Hibler [1997], which allows for long time steps that, in our case, are limited by the explicit treatment of the Coriolis term. The explicit treatment of the Coriolis term does not represent a severe limitation because it restricts the time step to approximately the same length as in the ocean model where the Coriolis term is also treated explicitly.
Hunke and Dukowicz [1997]'s introduced an elastic contribution to the strain rate in order to regularize Eq. 6.36 in such a way that the resulting elastic-viscous-plastic (EVP) and VP models are identical at steady state,
The EVP-model uses an explicit time stepping scheme with a short timestep. According to the recommendation of Hunke and Dukowicz [1997], the EVP-model is stepped forward in time 120 times within the physical ocean model time step (although this parameter is under debate), to allow for elastic waves to disappear. Because the scheme does not require a matrix inversion it is fast in spite of the small internal timestep and simple to implement on parallel computers [Hunke and Dukowicz, 1997]. For completeness, we repeat the equations for the components of the stress tensor
Here, the elastic parameter
To use the EVP solver, make sure that both SEAICE_CGRID and
SEAICE_ALLOW_EVP are defined in SEAICE_OPTIONS.h
(default). The solver is turned on by setting the sub-cycling time
step SEAICE_deltaTevp to a value larger than zero. The
choice of this time step is under debate. Hunke and Dukowicz [1997] recommend
order(120) time steps for the EVP solver within one model time step
![]() (deltaTmom). One can also choose order(120) time
steps within the forcing time scale, but then we recommend adjusting
the damping time scale
(deltaTmom). One can also choose order(120) time
steps within the forcing time scale, but then we recommend adjusting
the damping time scale ![]() accordingly, by setting either
SEAICE_elasticParm (
accordingly, by setting either
SEAICE_elasticParm (![]() ), so that
), so that
![]() forcing time scale
, or directly
SEAICE_evpTauRelax (
forcing time scale
, or directly
SEAICE_evpTauRelax (![]() ) to the forcing time scale.
) to the forcing time scale.
Moving sea ice exerts a stress on the ocean which is the opposite of
the stress
![]() in Eq. 6.35. This stess is
applied directly to the surface layer of the ocean model. An
alternative ocean stress formulation is given by Hibler and Bryan [1987].
Rather than applying
in Eq. 6.35. This stess is
applied directly to the surface layer of the ocean model. An
alternative ocean stress formulation is given by Hibler and Bryan [1987].
Rather than applying
![]() directly, the stress is derived
from integrating over the ice thickness to the bottom of the oceanic
surface layer. In the resulting equation for the combined
ocean-ice momentum, the interfacial stress cancels and the total
stress appears as the sum of windstress and divergence of internal ice
stresses:
directly, the stress is derived
from integrating over the ice thickness to the bottom of the oceanic
surface layer. In the resulting equation for the combined
ocean-ice momentum, the interfacial stress cancels and the total
stress appears as the sum of windstress and divergence of internal ice
stresses:
![]() , [see also
Eq.2 of Hibler and Bryan, 1987]. The disadvantage of this formulation is that
now the velocity in the surface layer of the ocean that is used to
advect tracers, is really an average over the ocean surface
velocity and the ice velocity leading to an inconsistency as the ice
temperature and salinity are different from the oceanic variables.
To turn on the stress formulation of Hibler and Bryan [1987], set
useHB87StressCoupling=.TRUE. in data.seaice.
, [see also
Eq.2 of Hibler and Bryan, 1987]. The disadvantage of this formulation is that
now the velocity in the surface layer of the ocean that is used to
advect tracers, is really an average over the ocean surface
velocity and the ice velocity leading to an inconsistency as the ice
temperature and salinity are different from the oceanic variables.
To turn on the stress formulation of Hibler and Bryan [1987], set
useHB87StressCoupling=.TRUE. in data.seaice.
6.6.2.4.2 Finite-volume discretization of the stress tensor
divergence
On an Arakawa C grid, ice thickness and concentration and thus ice
strength | (6.42) | ||
| (6.43) | ||
| (6.44) | ||
so that the diagonal terms of the strain rate tensor are naturally defined at C-points and the symmetric off-diagonal term at Z-points. No-slip boundary conditions (
For a spherical polar grid, the coefficients of the metric terms are
![]() and
and
![]() , with the spherical radius
, with the spherical radius ![]() and
the latitude
and
the latitude ![]() ;
;
![]() , and
, and
![]() . For a
general orthogonal curvilinear grid,
. For a
general orthogonal curvilinear grid, ![]() and
and
![]() can be approximated by finite differences of the cell widths:
can be approximated by finite differences of the cell widths:
| (6.45) | ||
| (6.46) | ||
| (6.47) | ||
| (6.48) |
The stress tensor is given by the constitutive viscous-plastic
relation
![]() [Hibler, 1979]. The stress tensor divergence
[Hibler, 1979]. The stress tensor divergence
![]() , is
discretized in finite volumes. This conveniently avoids dealing with
further metric terms, as these are ``hidden'' in the differential cell
widths. For the
, is
discretized in finite volumes. This conveniently avoids dealing with
further metric terms, as these are ``hidden'' in the differential cell
widths. For the ![]() -equation (
-equation (![]() ) we have:
) we have:
| (6.49) | |||
|
with
| |||
| (6.50) | |||
Similarly, we have for the ![]() -equation (
-equation (![]() ):
):
| (6.51) | |||
|
with
| |||
Again, no slip boundary conditions are realized via ghost points and
![]() and
and
![]() across boundaries. For
free slip boundary conditions the lateral stress is set to zeros. In
analogy to
across boundaries. For
free slip boundary conditions the lateral stress is set to zeros. In
analogy to
![]() on boundaries, we set
on boundaries, we set
![]() , or equivalently
, or equivalently
![]() , on boundaries.
, on boundaries.
6.6.2.4.3 Thermodynamics
In its original formulation the sea ice model [Menemenlis et al., 2005]
uses simple thermodynamics following the appendix of
Semtner [1976]. This formulation does not allow storage of heat,
that is, the heat capacity of ice is zero. Upward conductive heat flux
is parameterized assuming a linear temperature profile and together
with a constant ice conductivity. It is expressed as
![]() , where
, where ![]() is the ice conductivity,
is the ice conductivity, ![]() the ice
thickness, and
the ice
thickness, and
![]() the difference between water and ice
surface temperatures. This type of model is often refered to as a
``zero-layer'' model. The surface heat flux is computed in a similar
way to that of Parkinson and Washington [1979] and Manabe et al. [1979].
the difference between water and ice
surface temperatures. This type of model is often refered to as a
``zero-layer'' model. The surface heat flux is computed in a similar
way to that of Parkinson and Washington [1979] and Manabe et al. [1979].
The conductive heat flux depends strongly on the ice thickness ![]() .
However, the ice thickness in the model represents a mean over a
potentially very heterogeneous thickness distribution. In order to
parameterize a sub-grid scale distribution for heat flux
computations, the mean ice thickness
.
However, the ice thickness in the model represents a mean over a
potentially very heterogeneous thickness distribution. In order to
parameterize a sub-grid scale distribution for heat flux
computations, the mean ice thickness ![]() is split into seven thickness
categories
is split into seven thickness
categories ![]() that are equally distributed between
that are equally distributed between ![]() and a
minimum imposed ice thickness of
and a
minimum imposed ice thickness of
![]() cm
by
cm
by
![]() for
for ![]() . The heat fluxes computed for each
thickness category is area-averaged to give the total heat flux
[Hibler, 1984]. To use this thickness category parameterization set
#define SEAICE_MULTICATEGORY; note that this requires
different restart files and switching this flag on in the middle of an
integration is not possible.
. The heat fluxes computed for each
thickness category is area-averaged to give the total heat flux
[Hibler, 1984]. To use this thickness category parameterization set
#define SEAICE_MULTICATEGORY; note that this requires
different restart files and switching this flag on in the middle of an
integration is not possible.
The atmospheric heat flux is balanced by an oceanic heat flux from
below. The oceanic flux is proportional to
![]() where
where ![]() and
and ![]() are
the density and heat capacity of sea water and
are
the density and heat capacity of sea water and ![]() is the local
freezing point temperature that is a function of salinity. This flux
is not assumed to instantaneously melt or create ice, but a time scale
of three days (run-time parameter SEAICE_gamma_t) is used
to relax
is the local
freezing point temperature that is a function of salinity. This flux
is not assumed to instantaneously melt or create ice, but a time scale
of three days (run-time parameter SEAICE_gamma_t) is used
to relax ![]() to the freezing point.
The parameterization of lateral and vertical growth of sea ice follows
that of Hibler [1980,1979]; the so-called lead closing parameter
to the freezing point.
The parameterization of lateral and vertical growth of sea ice follows
that of Hibler [1980,1979]; the so-called lead closing parameter
![]() (run-time parameter HO) has a default value of
0.5 meters.
(run-time parameter HO) has a default value of
0.5 meters.
On top of the ice there is a layer of snow that modifies the heat flux and the albedo [Zhang et al., 1998]. Snow modifies the effective conductivity according to
where
Effective ice thickness (ice volume per unit area,
![]() ), concentration
), concentration ![]() and effective snow thickness
(
and effective snow thickness
(
![]() ) are advected by ice velocities:
) are advected by ice velocities:
where
There is considerable doubt about the reliability of a ``zero-layer''
thermodynamic model -- Semtner [1984] found significant errors in
phase (one month lead) and amplitude (![]() 50%overestimate) in
such models -- so that today many sea ice models employ more complex
thermodynamics. The MITgcm sea ice model provides the option to use
the thermodynamics model of Winton [2000], which in turn is based
on the 3-layer model of Semtner [1976] and which treats brine
content by means of enthalpy conservation. This scheme requires
additional state variables, namely the enthalpy of the two ice layers
(instead of effective ice salinity), to be advected by ice velocities.
The internal sea ice temperature is inferred from ice enthalpy. To
avoid unphysical (negative) values for ice thickness and
concentration, a positive 2nd-order advection scheme with a SuperBee
flux limiter [Roe, 1985] is used in this study to advect all
sea-ice-related quantities of the Winton [2000] thermodynamic
model. Because of the non-linearity of the advection scheme, care
must be taken in advecting these quantities: when simply using ice
velocity to advect enthalpy, the total energy (i.e., the volume
integral of enthalpy) is not conserved. Alternatively, one can advect
the energy content (i.e., product of ice-volume and enthalpy) but then
false enthalpy extrema can occur, which then leads to unrealistic ice
temperature. In the currently implemented solution, the sea-ice mass
flux is used to advect the enthalpy in order to ensure conservation of
enthalpy and to prevent false enthalpy extrema.
50%overestimate) in
such models -- so that today many sea ice models employ more complex
thermodynamics. The MITgcm sea ice model provides the option to use
the thermodynamics model of Winton [2000], which in turn is based
on the 3-layer model of Semtner [1976] and which treats brine
content by means of enthalpy conservation. This scheme requires
additional state variables, namely the enthalpy of the two ice layers
(instead of effective ice salinity), to be advected by ice velocities.
The internal sea ice temperature is inferred from ice enthalpy. To
avoid unphysical (negative) values for ice thickness and
concentration, a positive 2nd-order advection scheme with a SuperBee
flux limiter [Roe, 1985] is used in this study to advect all
sea-ice-related quantities of the Winton [2000] thermodynamic
model. Because of the non-linearity of the advection scheme, care
must be taken in advecting these quantities: when simply using ice
velocity to advect enthalpy, the total energy (i.e., the volume
integral of enthalpy) is not conserved. Alternatively, one can advect
the energy content (i.e., product of ice-volume and enthalpy) but then
false enthalpy extrema can occur, which then leads to unrealistic ice
temperature. In the currently implemented solution, the sea-ice mass
flux is used to advect the enthalpy in order to ensure conservation of
enthalpy and to prevent false enthalpy extrema.
6.6.2.5 Key subroutines
Top-level routine: seaice_model.F
C !CALLING SEQUENCE: c ... c seaice_model (TOP LEVEL ROUTINE) c | c |-- #ifdef SEAICE_CGRID c | SEAICE_DYNSOLVER c | | c | |-- < compute proxy for geostrophic velocity > c | | c | |-- < set up mass per unit area and Coriolis terms > c | | c | |-- < dynamic masking of areas with no ice > c | | c | | c | #ELSE c | DYNSOLVER c | #ENDIF c | c |-- if ( useOBCS ) c | OBCS_APPLY_UVICE c | c |-- if ( SEAICEadvHeff .OR. SEAICEadvArea .OR. SEAICEadvSnow .OR. SEAICEadvSalt ) c | SEAICE_ADVDIFF c | c |-- if ( usePW79thermodynamics ) c | SEAICE_GROWTH c | c |-- if ( useOBCS ) c | if ( SEAICEadvHeff ) OBCS_APPLY_HEFF c | if ( SEAICEadvArea ) OBCS_APPLY_AREA c | if ( SEAICEadvSALT ) OBCS_APPLY_HSALT c | if ( SEAICEadvSNOW ) OBCS_APPLY_HSNOW c | c |-- < do various exchanges > c | c |-- < do additional diagnostics > c | c o
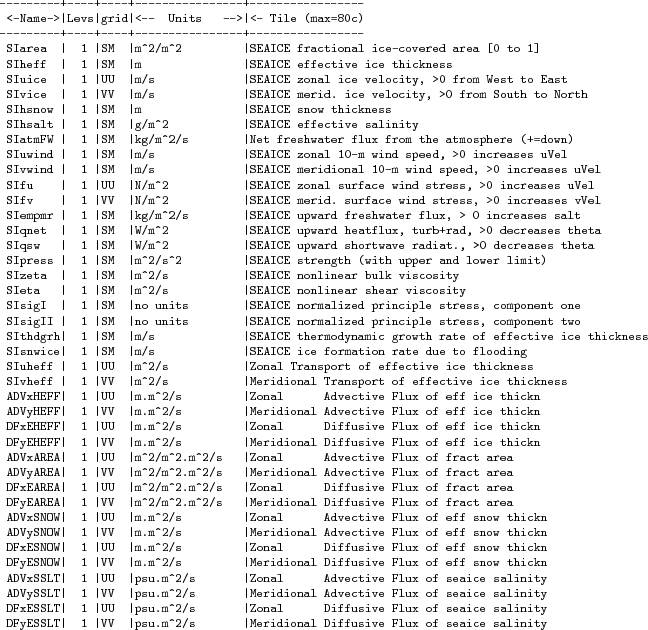
6.6.2.6 SEAICE diagnostics
Diagnostics output is available via the diagnostics package (see Section 7.1). Available output fields are summarized in Table 6.6.2.6.
6.6.2.7 Experiments and tutorials that use seaice
- Labrador Sea experiment in lab_sea verification directory.
Next: 6.6.3 SHELFICE Package Up: 6.6 Sea Ice Packages Previous: 6.6.1 THSICE: The Thermodynamic Contents mitgcm-support@mitgcm.org
| Copyright © 2006 Massachusetts Institute of Technology | Last update 2011-01-09 |


